
Autonomous Vehicles: Driving the Cities of Tomorrow
In the last decade driving automation technologies have grown rapidly, presenting new systems that are ready to change current mobility habits around the world. But most of the media hype and industry expectations are inflated – here’s a reality check:
Podcast with Jacopo Scudellari and Klemen Koželj. Source: Smart mobility podcast
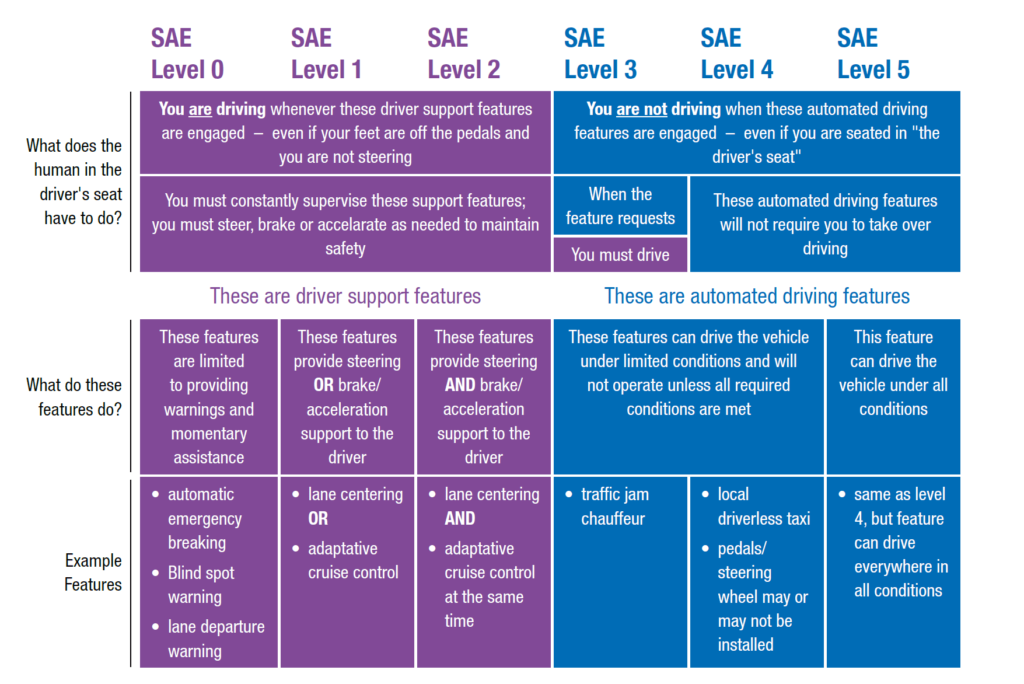
Today the most evolved passenger cars on the automotive market can be classified as Level 2 on the SAE classification (Figure 1), but can’t be considered autonomous vehicles (AVs). They have driving assistance systems and can drive alone under certain conditions, but there is still a long road to full automation – with recent fatal crashes serving as a stark reminder.
Announcing the first AVs before 2020, media and car manufacturers have inflated expectations and generated great enthusiasm around AVs. Yet undoubtedly AVs will have a disruptive impact on the transport system, but for the moment, the technology is too young and uncertain to ensure positive benefits. In fact, autonomous technology is growing faster than the legislation, and even if tests are starting to be carried out around the world, it is not clear how and by who the transition to AVs should be steered. At the same time, a great awareness about the possible (positive or negative) externalities of this sociotechnical transition is rising among planners and public administrations.
Positive and negative effects expected by autonomous vehicles
The wide diffusion of AVs in the mobility system could generate a range of potential effects. First, there are three socio-economic effects presented by the automotive industry as revolutionary: road safety, accessibility and free time. Consider a car driving autonomously and able to “speak” with other vehicles: removing human error would reduce fatalities; there would be more possibilities for those currently unable to drive; and free up people to do something else during their travel time – like resting or working. Of course, these impacts will depend on the adopted level of the technology and the penetration rate of AVs into the entire car fleet.
On the other hand, there are several potential effects that AVs could generate to the spatial urban dimension that have not been considered enough.
Autonomous vehicles will turn riders into users.
Thanks to radar, lidar and cameras, AVs will be extremely accurate in their movement, radically reducing the space necessary for circulation and parking. Moreover, vehicles could pick up/ drop off the users right outside their door, before then parking themselves. Consequently parking spaces could be replaced by a transition area, with parking transferred to dedicated spaces or structures where land is cheaper, leaving space for new developments, public areas or new green spaces.
However, it’s important to take a long term approach when considering the possible externalities of these benefits, ensuring that their impact doesn’t become a negative one.
AVs will transform riders into users, making travel a useful time to do other activities, reducing its negative value. This effect could generate new sprawling processes and increase average travel distances. Then again, the possibility of cars parking themselves could generate new traffic full of empty vehicles.
Mobility for everyone
At the same time, if AVs are affordable for everyone, considering also citizens that currently can’t drive (such as elderly, disabled, or young people), their accessibility will improve, but also result in an extreme car dependence and an increase to the total mobility demand.
The diffusion of AVs could also have negative impacts on public transport and non-motorized mobility. For example the modal split of active mobility could be reduced – something that would have negative consequences for health.
It is also necessary to consider how prominent sharing becomes in AV use, because the direction of these impacts will probably depend on it. Today, the idea of ‘Mobility as a Service’ (MaaS) is more widespread, and AVs will play a key role in this new approach. Consequently, the amount of privately-owned cars that are replaced by shared vehicles will be decisive in defining the positive or negative consequences of AVs.
Turin research project “steering the spatial impacts of the diffusion of autonomous vehicles”
Recently, the scientific community has focused on the role of public administration in relation to the possible effects of the spread of AVs, trying to avoid a passive attitude and taking the lead in this transition.
The research project “Steering the spatial impacts of the diffusion of autonomous vehicles”, led by Politecnico di Torino (Luca Staricco – scientific coordinator, Jacopo Scudellari, Elisabetta Vitale Brovarone, Valentina Rappazzo, Luca Davico), has studied how the introduction of AVs should be regulated in an urban context. The aim was to understand the potential impacts of driverless cars on the urban environment, providing the construction of the most desirable long-term vision, and identifying the transition paths to achieve it. The research was based on the Turin use-case for two reasons: in 2018 the municipality launched a pilot project for testing AV (Figure 2) and that Turin is working on of the next Sustainable Urban Mobility Plan, which could include measures for AVs.
The project was based on the backcasting approach, which is generally considered a suitable method to face those arguments characterized by a high level of uncertainty. Unlike forecasting, which tries to predict future development visions considering the current trends, backcasting moves in the opposite direction. It assumes the best future scenario and proceeds backwards in order to define the actions needed to achieve it.
The project involved 69 stakeholders, with expert knowledge on transport, mobility and innovation, bringing together the public and private sector, alongside the civic association, as to validate the entire process.

The project is divided into four phases:
1. Visioning
Three visions have been generated based on a scientific literature review and a think-tank model. All the visions assume a long-term prediction (2050), and that AVs will be fully connected & autonomous (level 5).
- The optimistic and technology-centered, “strong deregulation” scenario
- The pessimistic and superblock model, “strongly regulated” scenario
- The business as usual scenario
They are distinguished by 8 issues as key elements to regulate AV circulation and parking (such as road hierarchy, limitation to vehicle circulation, etc.), as well as to provide other modes of transport and mobility (lanes for public transport, cycling facilities, pedestrian areas, etc.).
2. Desired vision
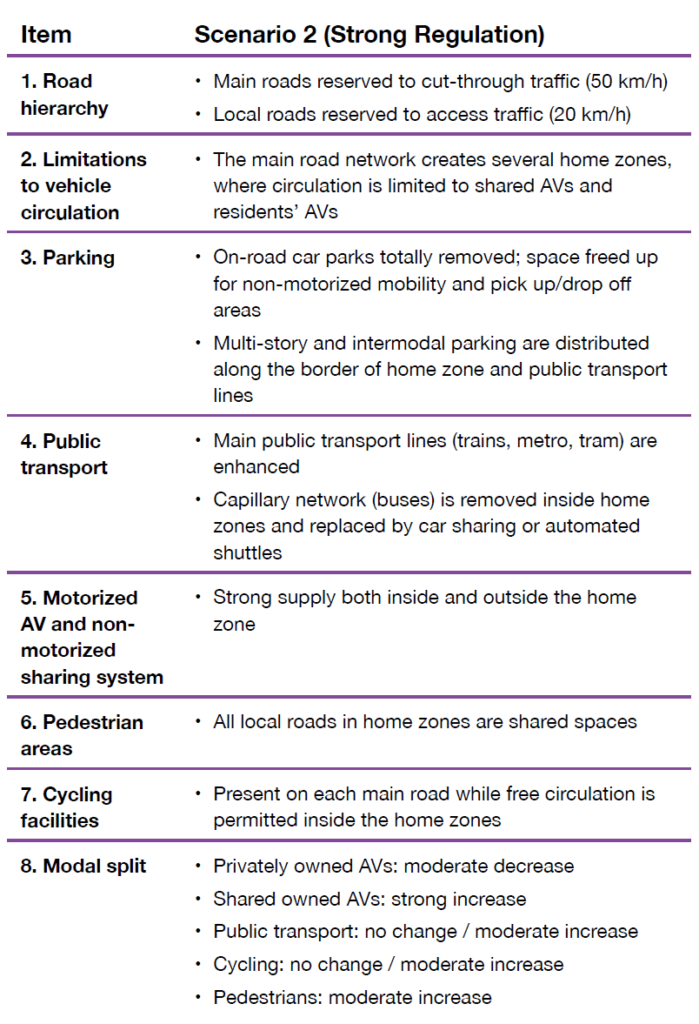
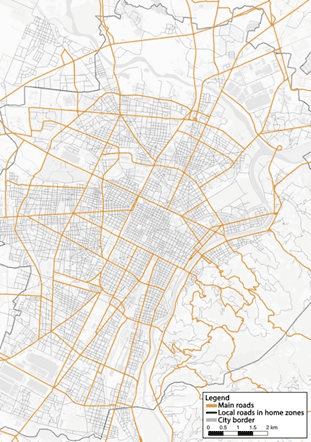
The participation process (more than 50 in-depth interviews) was useful in identifying the “regulated” scenario as the most advisable of the three visions, (Table 1). The second scenario, inspired by the superblock model, traces back to the neighborhood unit and collects two different opinions by the participants. On one hand, those who consider that vehicular traffic should be limited to the main roads, improving the quality and livability of public spaces at the neighborhood level. On the other hand those who repute the unpredictability of the autonomous circulation on the entire road network and see the main infrastructure as an easier technological solution (Figure 3).
3. Actions for the future
All the actions suggested during the interviews have been presented in a final workshop. Using the backcasting method we imagined scenario 2 to be in the year 2050. Thus it was participants were asked “when and what actions would I have had to take in the past to get to this situation today?” The result was a participated timeline strategy (policies, actions, and milestones), collecting more than 45 proposals. Most of the proposed actions were concentrated on the decade 2020-2030, focusing on normative and planning aspects. The participants highlighted the role of testing not only for technology development, but also to better understand the socio-economic implication of AVS.
4. Road map and policy packaging
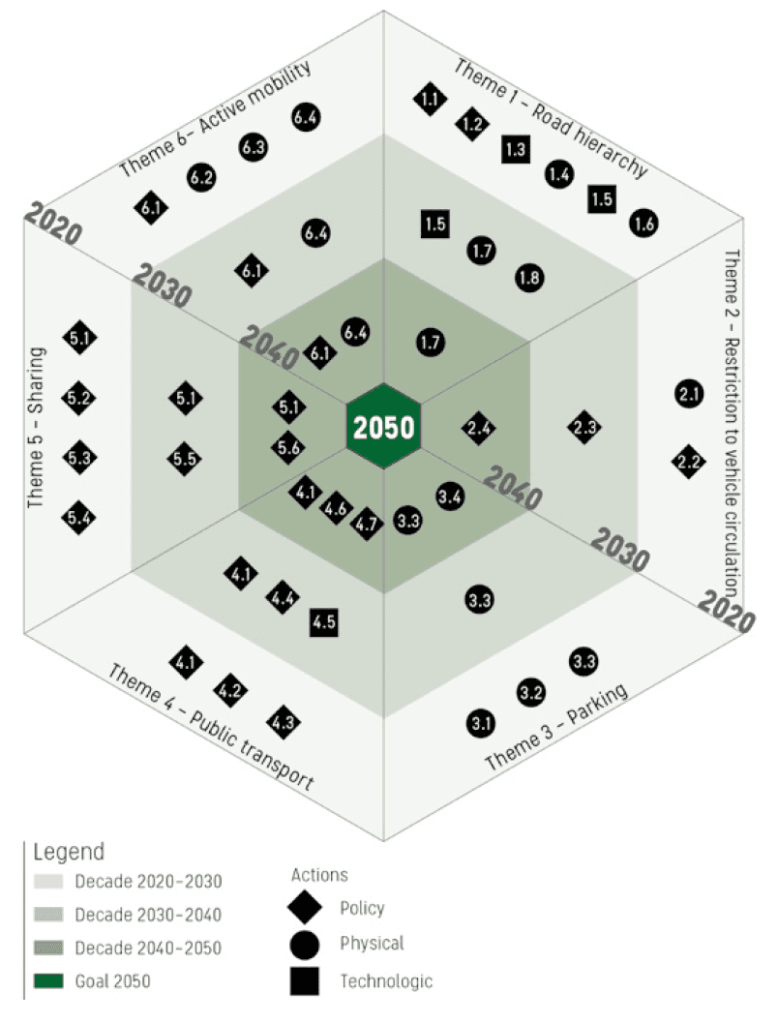
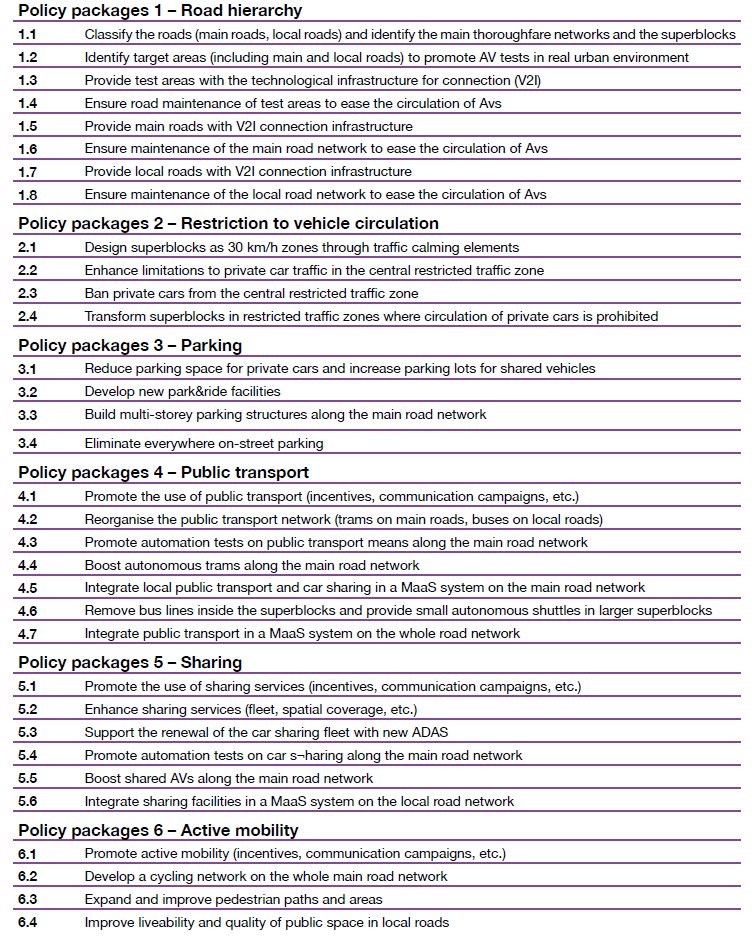
In conclusion, the research team has synthesized the workshop results into building the final roadmap for the implementation of the AVs. In total, 33 key actions (shown in table 2 below) have been distributed into 6 specific policy packages (Figure 4) and subdividing each action in terms of type: policy; technology; and physical transformation of the urban space.
According to the Eltis guideline, the Sustainable Urban Mobility Plan (SUMP) was assumed as the key planning tool to set the strategy towards the desired scenario. The next three decades mark the action that the public administration should implement in order to lead the transition to autonomous mobility and reach the most sustainable vision.
A transition to sustainable cities of tomorrow
Turin could draw huge benefits from the transition to AVs in terms of accessibility, livability and urban quality. However, due to the relevant uncertainty around autonomous mobility, it’s necessary for local public authorities to look ahead and to start immediately leading the transition – avoiding possible negative outcomes. For this reason participants to the research project suggested the need for extended governance, both public and private, in order to better deal with the technological unpredictability and to create a common vision. The six-policy pathway developed from the research illustrates which mobility measures can be adopted for the transition to AVs. The SUMP is the best planning tool as it focuses not only on the regulation of circulation and parking, but also considers public transport, sharing mobility, and active mobility. According to UITP, AVs represent a great opportunity for urban mobility only if public transport and sharing systems have an active role – starting from the short term. Urban and transport policies can steer the transition to autonomous driving, taking us towards the sustainable and livable cities of tomorrow, starting from the cities of the present.
Featured in

Join Planet
REVOLVE today
We strive to communicate sustainability for a better world for the next generations.
Support us by becoming a member of REVOLVE Planet today.
Become a Member